快速上手¶
简介¶
openEuler Embedded是基于openEuler社区面向嵌入式场景的Linux版本。由于嵌入式系统应用受到如资源、功耗、多样性等因素的约束,面向服务器领域的Linux及相应的构建系统很难满足嵌入式场景的要求,因此业界广泛采用 Yocto 来定制化构建嵌入式Linux。openEuler Embedded当前也采用了Yocto进行构建,但实现了与openEuler其他版本代码同源。
本章节将介绍如何基于 yocto-meta-openeuler 仓库构建ARM64 QEMU镜像,以及如何基于镜像和生成的SDK完成基本的嵌入式Linux应用开发。建议按照指导步骤完成镜像构建和运行,以熟悉 openEuler Embedded的镜像构建流程。树莓派等其它平台镜像的构建开发流程也类似,具体可参阅 南向支持 章节。
构建 ARM64 QEMU 镜像¶
openEuler Embedded采用yocto构建,同时设计了基于Python的元工具 oebuild 以简化相对复杂的yocto构建流程。按照以下步骤可以快速构建出一个openEuler Embedded镜像。
Note
- 当前 仅支持在x86_64位的Linux环境 下使用 oebuild 进行构建,且需在 普通用户 下进行 oebuild 的安装运行。更多关于 oebuild 的介绍请参阅 oebuild 介绍 章节。
openEuler Embedded 的 CI 会归档最新的构建镜像。若希望快速获取可用的镜像,请访问 dailybuild ,在
embedded_img中可以下载镜像。
1. 安装必要的主机包¶
需要在构建主机上安装必要的主机包,包括oebuild及其运行依赖:
# 安装必要的软件包 $ sudo yum install python3 python3-pip docker $ pip install oebuild # 配置docker环境 $ sudo usermod -a -G docker $(whoami) $ sudo systemctl daemon-reload && sudo systemctl restart docker $ sudo chmod o+rw /var/run/docker.sock# 安装必要的软件包 $ sudo apt-get install python3 python3-pip docker docker.io $ pip install oebuild # 配置docker环境 $ sudo usermod -a -G docker $(whoami) $ sudo systemctl daemon-reload && sudo systemctl restart docker $ sudo chmod o+rw /var/run/docker.sock#安装必要的软件包 $ sudo zypper install python311 python311-pip docker $ pip3 install oebuild #配置docker环境 $ sudo usermod -a -G docker $(whoami) $ sudo systemctl restart docker $ sudo chmod o+rw /var/run/docker.sock $ sudo systemctl enable docker #配置最新版python $ cd /usr/bin $ sudo rm python python3 $ sudo ln -s python3.11 python $ sudo ln -s python3.11 python3
2. 初始化oebuild构建环境¶
运行 oebuild 完成初始化工作,包括创建工作目录、拉取构建容器等,之后的构建都需要在
<work_dir>下进行:# <work_dir> 为要创建的工作目录 $ oebuild init <work_dir> # 切换到工作目录 $ cd <work_dir> # 拉取构建容器、yocto-meta-openeuler 项目代码 $ oebuild update
3. 开始构建¶
继续执行以下命令进行
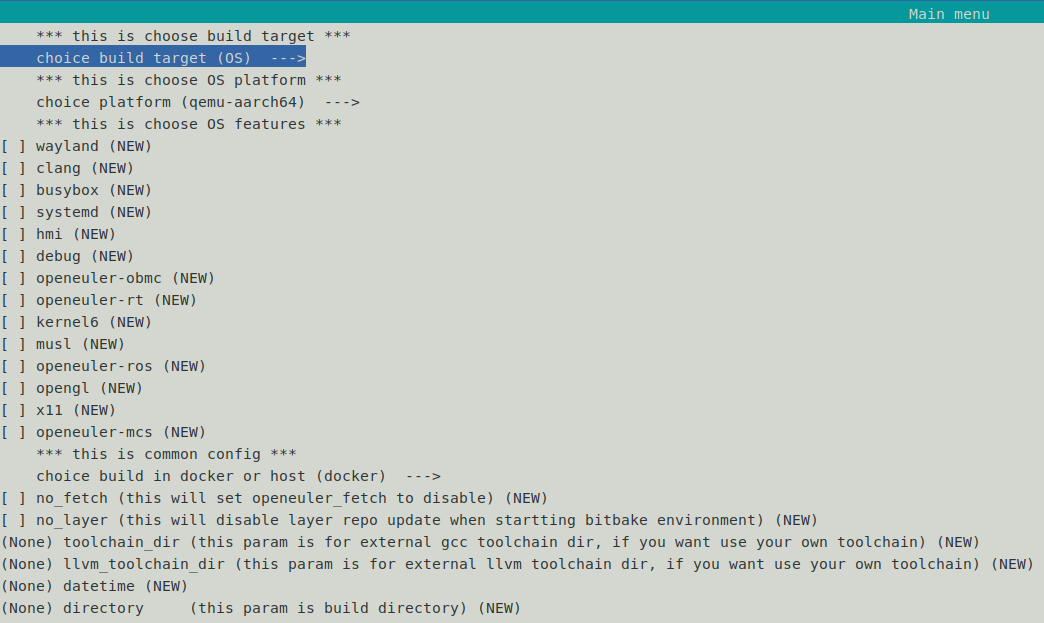
ARM64 QEMU镜像的构建,build_arm64为该镜像的构建目录:# 所有的构建工作都需要在 oebuild 工作目录下进行 $ cd <work_dir> # 为 openeuler-image-qemu-arm64 镜像创建配置文件 compile.yaml $ oebuild generate -p qemu-aarch64 -d build_arm64 # 切换到包含 compile.yaml 的编译空间目录,如 build/build_arm64/ $ cd build/build_arm64/ # 根据提示进入 build_arm64 构建目录,并开始构建 $ oebuild bitbake openeuler-image除了使用上述命令进行配置文件生成之外,还可以使用如下命令进入到菜单选择界面进行对应配置填写和选择,此菜单选项可以替代上述命令中的
oebuild generate -p qemu-aarch64 -d build_arm64,选择保存之后继续执行上述命令中的bitbake及后续命令即可。oebuild generate具体界面如下图所示:
4. 运行镜像¶
完成构建后,在构建目录下的
output目录下可以看到如下文件:
zImage: 内核镜像,基于openEuler社区Linux 5.10内核构建;
openeuler-image-qemu-xxx.cpio.gz: 标准根文件系统镜像, 进行了必要安全加固,增加了audit、cracklib、OpenSSH、Linux PAM、shadow、iSulad容器等所支持的软件包;
openeuler-image-qemu-aarch64-xxx.iso: iso格式的镜像,可用于制作U盘启动盘;
vmlinux: 对应的vmlinux镜像,可用于内核调试。在主机上通过以下命令安装QEMU:
$ sudo yum install qemu-system-aarch64
$ sudo apt-get install qemu-system-arm
$ sudo zypper install qemu-arm
之后,通过以下命令启动镜像:
$ qemu-system-aarch64 -M virt-4.0 -m 1G -cpu cortex-a57 -nographic \ -kernel zImage \ -initrd openeuler-image-qemu-aarch64-*.rootfs.cpio.gzQEMU运行成功并登录后,将会呈现openEuler Embedded的Shell。
如果想关闭当前镜像,可以使用’<Ctrl-A>+X’直接退出,或者在初始用户登录完成后,通过以下命令关闭:
$ poweroffQEMU就会退出并回到启动时的目录。
Note
由于标准根文件系统镜像进行了安全加固,因此第一次启动时,需要为登录用户名root设置密码,且密码强度有相应要求,需要 数字、字母、特殊字符组合最少8位,例如openEuler@2023
如果想了解有关运行 QEMU 的更多帮助信息,包括如何使能网络、如何共享主机文件等,请参阅开发手册中的 QEMU使用 章节。
基于SDK的应用开发¶
嵌入式系统往往面临资源受限的问题,包括处理器性能、内存容量、存储空间等方面。因此,需要使用交叉编译器在构建主机上编译目标代码,并在目标系统(开发板/仿真器)上运行。
openEuler Embedded提供了SDK自解压安装包,包含了应用程序开发所依赖的交叉编译器、库、头文件。下面将介绍如何构建ARM64的SDK,以及如何使用SDK进行用户态程序和内核模块的开发。
1. 构建SDK¶
进入到镜像构建目录
build_arm64,执行以下命令:oebuild bitbake openeuler-image -c do_populate_sdk构建完成后,在
output目录下新生成的文件夹(文件夹名通过当前时间生成)内,可以看到SDK安装包:
openeuler-glibc-x86_64-xxxxx-toolchain-xxxx.sh: openEuler Embedded SDK自解压安装包,SDK包含了开发(用户态程序、内核模块等)所必需的工具、库和头文件等。Note
openEuler Embedded SDK主要包含两大部分:
目标系统对应的开发用根文件系统, 在
<目标架构>-openeuler-linux目录下,包含动态库、静态库、内核源码、头文件、配置文件、文档等,一般不包含目标系统可执行文件主机开发工具,在
<主机架构>-openeulersdk-linux目录下,默认只包含有GCC交叉编译工具链,没有其他主机工具,如cmake, ninja,make等,如果需要,需自行 在主机上安装, 或者配置nativesdk, 包含更多的主机工具,具体可以参考ROS2 SDK。
2. 安装SDK¶
安装依赖软件包
使用SDK开发内核模块需要安装一些必要的软件包,运行如下命令:
$ sudo yum install make gcc g++ flex bison gmp-devel libmpc-devel openssl-devel elfutils-libelf-devel
$ sudo apt-get install make gcc g++ flex bison libgmp3-dev libmpc-dev libssl-dev libelf-dev
$ sudo zypper in gcc gcc-c++ make bison gmp-devel libmpc3 openssl cmake flex libelf-devel
执行SDK自解压安装脚本
首先找到上一步生成的.sh文件所在的目录(在
build_arm64/output/<文件夹名>/路径下,一个例子是build_arm64/output/20230904145457/。如有多个数字命名的文件夹,则可根据文件夹名找出最新输出的sh文件目录),或者从构建 目录tmp/deploy/sdk中获取,之后运行如下命令:$ sh openeuler-glibc-x86_64-openeuler-image-aarch64-qemu-aarch64-toolchain-*.sh根据提示输入工具链的安装路径,默认路径是
/opt/openeuler/<openeuler version>,若不设置,则按默认路径安装;也可以配置相对路径或绝对路径。 其中 “*” 代表不同的版本。一个例子如下:
$ sh openeuler-glibc-x86_64-openeuler-image-aarch64-qemu-aarch64-toolchain-*.sh openEuler embedded(openEuler Embedded Reference Distro) SDK installer version * ================================================================ Enter target directory for SDK (default: /opt/openeuler/<openeuler version>): sdk You are about to install the SDK to "/usr1/openeuler/sdk". Proceed [Y/n]? y Extracting SDK...............................................done Setting it up...SDK has been successfully set up and is ready to be used. Each time you wish to use the SDK in a new shell session, you need to source the environment setup script e.g. $ . /usr1/openeuler/sdk/environment-setup-aarch64-openeuler-linux设置SDK环境变量
执行上一步结束末尾打印出的source命令即可。实际命令中的路径可能与上方不同,请以实际为准。
如果提示权限不够,可用`sudo -s`提升权限再运行。
$ . /usr1/openeuler/sdk/environment-setup-aarch64-openeuler-linux查看是否安装成功
运行如下命令,查看是否安装成功、环境设置是否成功。相关指令及成功示例如下:
$ aarch64-openeuler-linux-gcc -v Using built-in specs. COLLECT_GCC=aarch64-openeuler-linux-gcc COLLECT_LTO_WRAPPER=/opt/openeuler/oecore-x86_64/sysroots/ x86_64-openeulersdk-linux/...(较长省略) Thread model: posix Supported LTO compression algorithms: zlib gcc version 10.3.1 (crosstool-NG 1.25.0)
3. 使用SDK编译hello world样例¶
准备代码
以构建一个hello world程序为例,运行在openEuler Embedded根文件系统镜像中。
创建一个
hello.c文件,源码如下:#include <stdio.h> int main(void) { printf("hello world\n"); }编写CMakeLists.txt,和hello.c文件放在同一个目录。
project(hello C) add_executable(hello hello.c)编译生成二进制文件
进入
hello.c文件所在目录,使用工具链编译, 命令如下:$ cmake . $ make把编译好的hello程序拷贝到openEuler Embedded系统中。
运行用户态程序
在openEuler Embedded系统中运行hello程序。
$ ./hello如运行成功,则会输出
hello world。
4. 使用SDK编译内核模块样例¶
准备代码
以编译一个最简单的内核模块为例,运行在openEuler Embedded内核中。
创建一个
hello.c文件,源码如下:#include <linux/init.h> #include <linux/module.h> static int hello_init(void) { printk("Hello, openEuler Embedded!\r\n"); return 0; } static void hello_exit(void) { printk("Byebye!\r\n"); } module_init(hello_init); module_exit(hello_exit); MODULE_LICENSE("GPL");编写Makefile,和`hello.c`文件放在同一个目录:
KERNELDIR := ${KERNEL_SRC} CURRENT_PATH := $(shell pwd) target := hello obj-m := $(target).o build := kernel_modules kernel_modules: $(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modules clean: $(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean
KERNEL_SRC为SDK中内核源码树的目录,该变量在安装SDK后会被自动设置。编译生成内核模块
进入hello.c文件所在目录,使用工具链编译,命令如下:
$ make将编译好的hello.ko拷贝到openEuler Embedded系统中。
插入内核模块
在openEuler Embedded系统中插入内核模块:
$ insmod hello.ko如运行成功,则会在内核日志中出现
Hello, openEuler Embedded!。
了解更多¶
相信根据上述指导完成了QEMU镜像的构建、运行后,您对 openEuler Embedded 的开发构建流程已经有所熟悉,但您也许会有一些疑惑: openEuler Embedded还能用来做些什么?如何理解和学习yocto?如何更深入地参与项目的讨论建设?
您可以阅读文档相关的介绍,或参与SIG组例会,更深入地了解openEuler Embedded:
非常希望您在深入了解openEuler Embedded之后,能有一个良好的体验。对于遇到的问题,欢迎到SIG组例会上交流,或者在 Issues 中反馈,同时也十分欢迎您的提交。