嵌入式ROS运行时支持¶
总体介绍¶
机器人尤其服务机器人领域近年来发展迅速,ROS是一个适用于机器人的开源的元操作系统,已在众多领域被广泛应用,常规ROS存在较多平台约束,大多与ubuntu等desktop版本强依赖。
随着ROS1开始广泛融入各领域无人系统的研发,陆续暴露了系统的诸多问题。为了适应新时代机器人研发的和操作系统生态发展的需要,ROS2应运而生。
为使能ROS2在高度定制化的嵌入式Linux运行,支持通过yocto构建的meta-ROS(原LG维护)layer层成为嵌入式ROS支持的关键途径。然而,当前原生meta-ros应用门槛较高且未充分考虑嵌入式运行时的关键场景要素。
openEuler Embedded的嵌入式ROS运行时支持意在提高易用性、解决高门槛问题的同时,构建嵌入式运行时竞争力(如实时、小型化等)。
框架¶
openEuler Embedded中ROS运行时整体架构图如下所示,分为运行视图和构建视图,构建视图总体基于开源meta-ros layer meta-ros 作为基础。
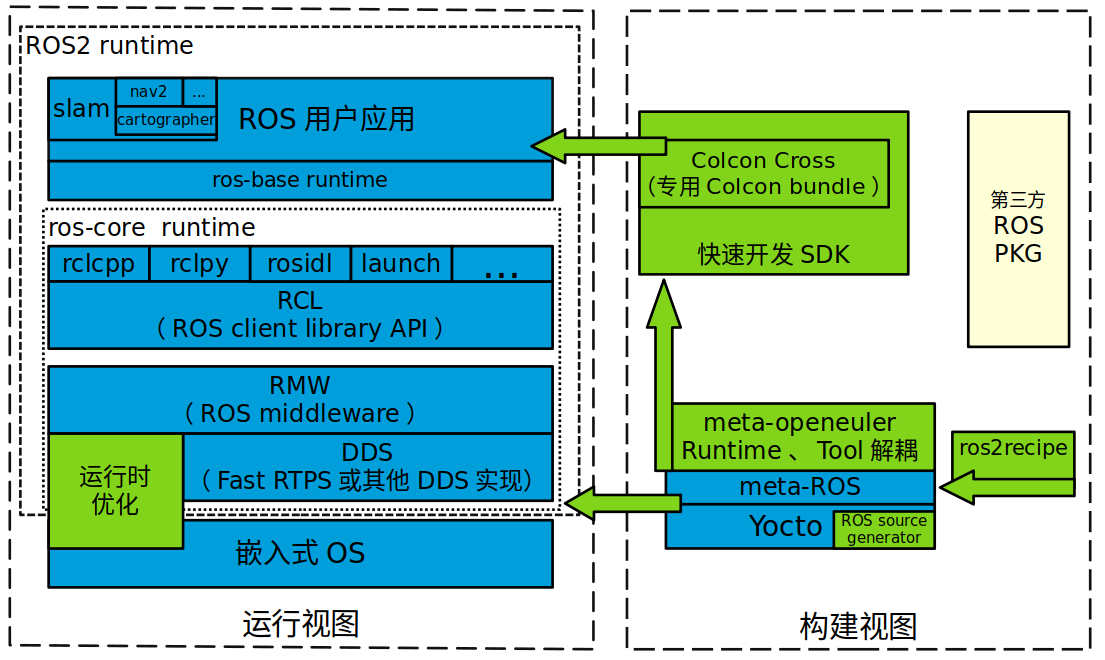
图 1 openEuler Embedded中ROS运行时支持基础架构¶
其中,
meta-openuler层 提供依赖解耦和嵌入式定制(针对编译类、观测类、仿真类等工具对onboard/运行时部署进行解耦),负责镜像快速集成和SDK工具的生成。
ros2recipe模块 提供了第三方ros源码到yocto配方的转换工具(不同于社区原生meta-ros生成工具superflore),作为meta-openeuler镜像快速集成的输入。
快速开发SDK模块 提供了第三方ros源码到运行时应用的交叉编译转化。
运行时优化模块 联通OS侧特性,链接混合关键部署等RTOS实时及总线能力,最终提供复杂系统的实时和通信解决方案。
镜像构建指南¶
openEuler Embedded 支持ROS运行时相关组件的单独构建和镜像集成构建案例。
构建指导
使用oebuild进行构建即可,具体使用方式参照oebuild指导,构建qemu-ros参照如下命令:
$ oebuild generate -p aarch64-std -f openeuler-ros -d aarch64-qemu-ros $ oebuild bitbake $ bitbake openeuler-image-ros
构建树莓派参照如下命令
$ oebuild generate -p raspberrypi4-64 -f openeuler-ros -d raspberrypi4-64-ros $ oebuild bitbake $ bitbake openeuler-image-ros
Note
当前openeuler-image-ros镜像默认集成ros-core核心功能
基于树莓派的openeuler-image-ros镜像还加入了SLAM典型功能 (相关导航和制图典型场景功能正在完善中,欢迎试用和加入贡献)
另外按照嵌入式运行时原则,将尽量不在target集成编译类、观测类、仿真类等工具
镜像使用示例¶
以qemu-aarch64和originbot小车(树莓派作为主控板)为例:
1.QEMU多机部署和demo_nodes_cpp示例
step1: 部署两个QEMU机器
在host中创建网桥br0
brctl addbr br0启动qemu1
qemu-system-aarch64 -M virt-4.0 -m 1G -cpu cortex-a57 -nographic \ -kernel zImage \ -initrd <openeuler-image-qemu-xxx.cpio.gz> \ -device virtio-net-device,netdev=tap0,mac=52:54:00:12:34:56 \ -netdev bridge,id=tap0Attention
首次运行如果出现如下错误提示,
failed to parse default acl file `/usr/local/libexec/../etc/qemu/bridge.conf' qemu-system-aarch64: bridge helper failed则需要向指示的文件添加”allow br0”
echo "allow br0" > /usr/local/libexec/../etc/qemu/bridge.conf启动qemu2
qemu-system-aarch64 -M virt-4.0 -m 1G -cpu cortex-a57 -nographic \ -kernel zImage \ -initrd openeuler-image-qemu-aarch64-2023xxx.rootfs.cpio.gz \ -device virtio-net-device,netdev=tap1,mac=52:54:00:12:34:78 \ -netdev bridge,id=tap1Attention
qemu1与qemu2的mac地址需要配置为不同的值
配置IP
配置host的网桥地址
ifconfig br0 192.168.10.1 up配置qemu1的网络地址
ifconfig eth0 192.168.10.2配置qemu2的网络地址
ifconfig eth0 192.168.10.3step2: 分别在两个QEMU机器中运行demo_nodes_cpp发布和订阅
qemu1执行
# ROS环境变量初始化 $ source /etc/profile.d/ros/setup.bash # demo消息订阅 $ ros2 run demo_nodes_cpp listenerqemu2执行
# ROS环境变量初始化 $ source /etc/profile.d/ros/setup.bash # demo消息发布 $ ros2 run demo_nodes_cpp talkerNote
单机通信同理,在同一台设备上通过多个终端分别执行demo_nodes_cpp发布和订阅即可,属于ROS常规用法,不再详述。
2.originbot小车制图和导航示例(树莓派作为主控板)
step1: originbot小车雷达USB、底盘驱动板串口完成连接
以树莓派作为主控板为例,假如雷达使用USB串口且对应设备为ttyUSB0、底盘串口使用GPIO 14/15且对应ttyS0
Note
以上串口设备为示例配置,雷达串口号和originbot底盘串口号用户可自行修改配置,配置文件位置例(直接修改即生效):
/usr/share/originbot_base/launch/robot.launch.py
/usr/share/originbot_bringup/param/ydlidar.yaml
step2: 环境准备,并配置originbot小车和观测PC处于同一网段
以树莓派作为主控板通过无线网络连接为例(可使用无线路由器或无线热点,需要小车和观测PC处于同一个网段)
openEuler Embedded树莓派使能无线连接参见 openEuler Embedded网络配置-Wi-Fi网络配置
step3: 通过观测PC,远程ssh登录originbot小车,执行运行时ROS应用
以建图为例,整体过程和originbot官网过程一样,可参考
首先,ssh登录originbot小车终端1,执行如下命令
# ROS环境变量初始化 $ source /etc/profile.d/ros/setup.bash # 启动机器人底盘和激光雷达: $ ros2 launch originbot_bringup originbot.launch.py use_lidar:=true然后,ssh登录originbot小车终端2,执行如下命令
# ROS环境变量初始化 $ source /etc/profile.d/ros/setup.bash # 启动cartographer建图算法: $ ros2 launch originbot_navigation cartographer.launch.pystep4: 在观测端PC,启动上位机可视化软件以便查看SLAM的完整过程,同时启动上位机键盘控制远程小车
整体过程和originbot官网过程一样,可参考
首先,观测端PC开启一个终端,进入ROS环境后启动rviz观测软件
$ ros2 launch originbot_viz display_slam.launch.py然后,观测端PC开启另一个终端,进入ROS环境后启动键盘控制节点用于控制小车,并按照提示控制小车完成建图
$ ros2 run teleop_twist_keyboard teleop_twist_keyboardstep5: 保存运行时数据(建图数据等)
以建图保存为例,整体过程和originbot官网过程一样,可参考
不要关闭之前步骤的端口,ssh登录originbot小车终端3,执行如下命令
# ROS环境变量初始化 $ source /etc/profile.d/ros/setup.bash # 保存地图: $ ros2 run nav2_map_server map_saver_cli -f my_map --ros-args -p save_map_timeout:=10000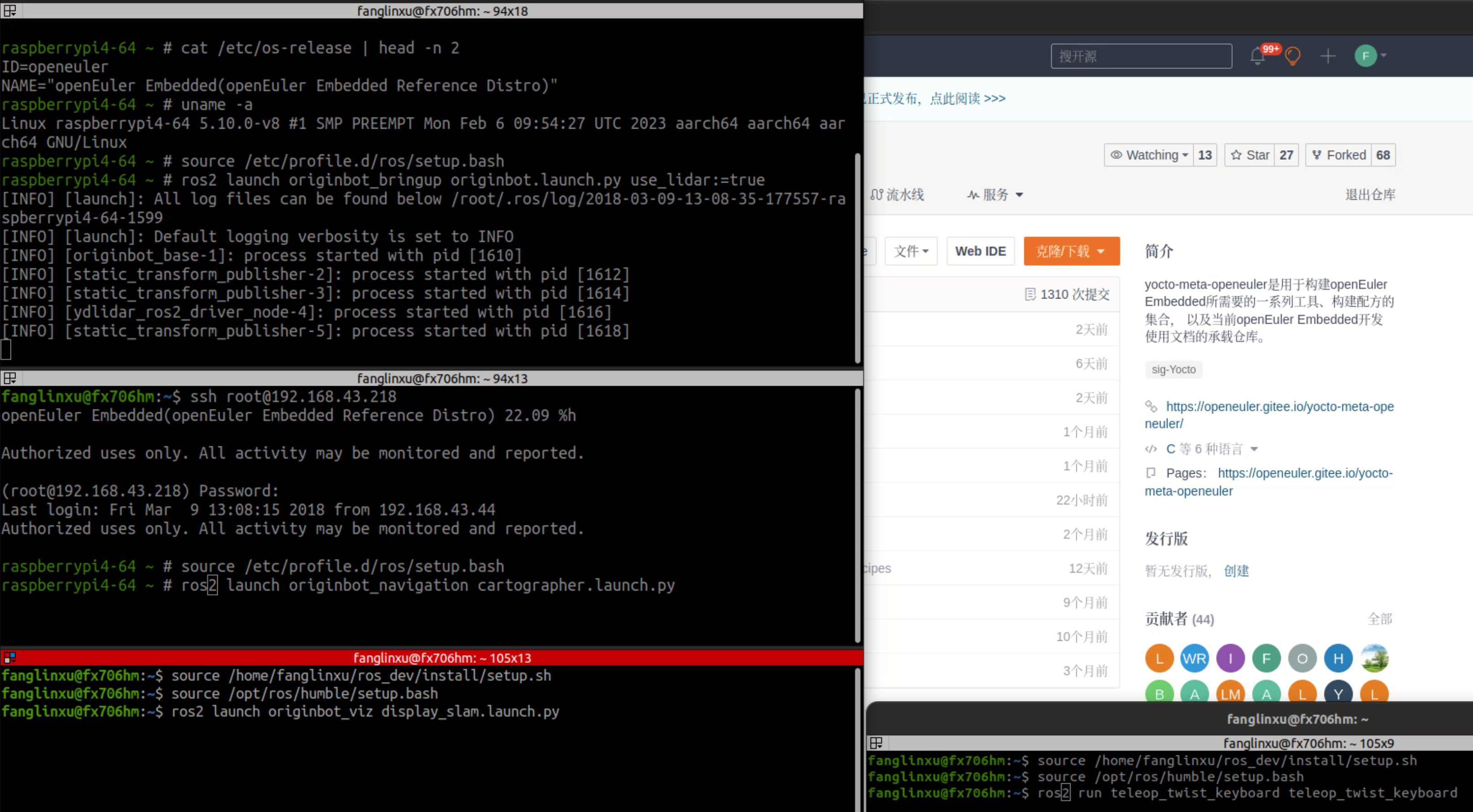
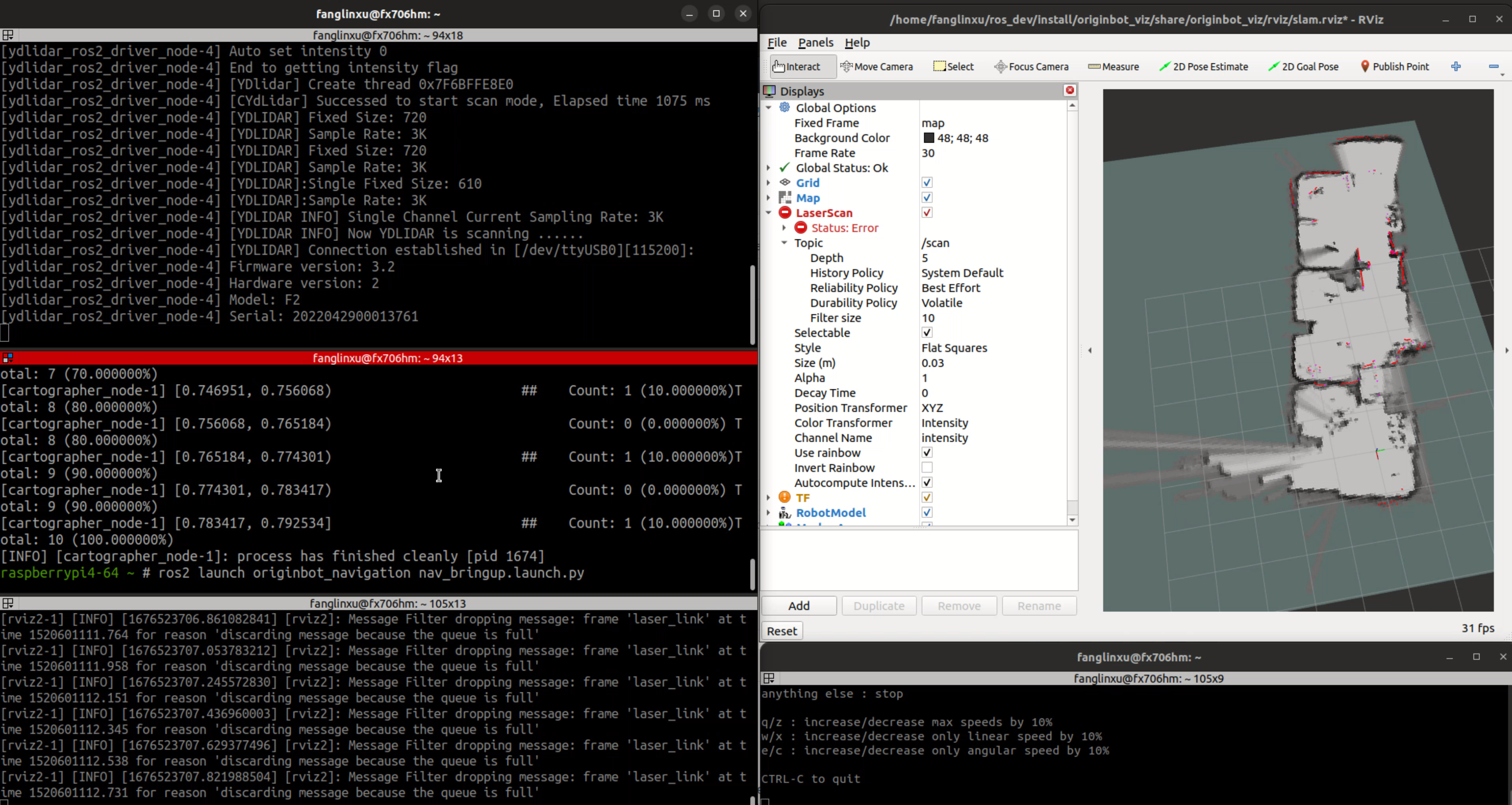
图 2 openEuler Embedded中ROS SLAM DEMO示例¶
如何开发和贡献¶
1、关于ROS源码
上游ROS发布的源码存放于github,对中国用户下载较慢,且src-openEuler社区针对ROS全量分包源码还在完善,
为加构建过程,嵌入式版本统一将ROS涉及的ROS软件包临时存放于yocto-embedded-tools仓库的dev_ros分支中,并遵循一定的源码存放规则,后续src-openeuler针对ROS分包支持后将对此部分进行优化。
源码存放规则(暂行)
仓库:https://gitee.com/openeuler/yocto-embedded-tools.git
分支:dev_ros
相对目录:ros_depends
要求:
按照yocto的包名作为文件夹名,单独存放tarball压缩包,例如ros_depends/tf2/0.13.12-1.tar.gz,并按要求填充src.txt配置文件,tarball的下载建议使用src_helper.sh脚本。
src_helper.sh脚本说明
当前目录中提供了src_helper.sh脚本,脚本会根据src.txt描述文件进行对应包名目录的创建并通过wget下载对应的包, 该脚本用于开发者添加新源码包到该仓库时使用。
src.txt说明
若需要引入新的ROS标准包,开发者可追加ros.txt内容,并按如下规则:
第一列 为yocto中包名
第二列 为该包在yocto中定义的工作目录,比如通常SRC_URI若为git链接,则需使用git。单包多压缩包目录可表示多行,可参见foonathan-memory
第三列 为该包的上游获取地址,若为标准ROS包,开发者可从meta-ros对应distro的bb文件中通过”matches with”关键字获取到。
Note
第一列和第二列的包名在yocto构建时将自动引用
整个yocto-embedded-tool的dev_ros分支,在构建时会以新本地名字ros-dev-tools作为构建源码输入存在
实现参见: openeuler_ros_source.bbclass
2、关于ros2recipe
现状: ros2recipe当前还处于前期开发阶段,在依赖解析部分还存在较多工作,其原理类似meta-ros的生成工具superflore。
例子: 我们在yocto工程中集成了originbot ros第三方包,其基础bb配方是通过ros2recipe工具转化,但目前还需要增加bbappend文件来适配部分依赖。
其他说明: superfores能够实现以一个ROS版本生成全量官方ROS组件包,需要对整体ROS和oe层进行了复杂的依赖关联,但不支持将独立的第三方包转换为yocto配方。
针对该场景,ros2recipe如何能够更好更快的补全依赖关系和减少手工bbappend的适配,是一个很有挑战工作,我们会逐步完善,在此也期待您的贡献。
使用方法
yocto-meta-openeuler/scripts/ros2recipe.shNote
其中相对目录的使用原理,请参考并理解“关于ROS源码”
3、关于快速开发SDK
暂未发布,敬请期待,同时欢迎您的参与