混合关键性系统¶
混合关键性系统特性介绍¶
在嵌入式场景中,虽然Linux已经得到了广泛应用,但并不能覆盖所有需求,例如高实时、高可靠、高安全的场合。这些场合往往是实时操作系统的用武之地。有些应用场景既需要Linux的管理能力、丰富的生态又需要实时操作系统的高实时、高可靠、高安全,那么一种典型的设计是采用一颗性能较强的处理器运行Linux负责富功能,一颗微控制器/DSP/实时处理器运行实时操作系统负责实时控制或者信号处理,两者之间通过I/O、网络或片外总线的形式通信。这种方式存在的问题是,硬件上需要两套系统、集成度不高,通信受限与片外物理机制的限制如速度、时延等、软件上Linux和实时操作系统两者之间是割裂的,在灵活性上、可维护性上存在改进空间。
受益于硬件技术的快速发展,嵌入式系统的硬件能力越来越强大,如单核能力不断提升、单核到多核、异构多核乃至众核的演进,虚拟化技术和可信执行环境(TEE)技术的发展和应用,未来先进封装技术会带来更高的集成度等等,使得在一个片上系统中(SoC)部署多个OS具备了坚实的物理基础。
同时,受应用需求的推动,如物联网化、智能化、功能安全与信息安全等等,整个嵌入式软件系统也越发复杂,全部由单一OS承载所有功能所面临的挑战越来越大。解决方式之一就是不同系统负责所各自所擅长的功能,如Windows的UI、Linux的网络通信与管理、实时操作系统的高实时与高可靠等,而且还要易于开发、部署、扩展,实现的形式可以是容器、虚拟化等。
面对上述硬件和应用的变化,结合自身原有的特点,嵌入式系统未来演进的方向之一就是 混合关键性系统(MCS, Mixed Criticality System), 这可以从典型的嵌入式系统-汽车电子的最近发展趋势略见一斑。

图 1 openEuler Embedded中的混合关键性系统大致架构¶
从openEuler Embedded的角度,混合关键性系统的大致架构如上图所示,所面向的硬件是具有同构或异构多核的片上系统,从应用的角度看会同时部署多个OS/运行时,例如Linux负责系统管理与服务、1个实时操作系统负责实时控制、1个实时操作系统负责系统可靠、1个裸金属运行时运行专用算法,全系统的功能是由各个OS/运行时协同完成。中间的 混合部署框架 和 嵌入式虚拟化 是具体的支撑技术。关键性(Criticality)狭义上主要是指功能安全等级,参考泛功能安全标准IEC-61508,Linux可以达到SIL1或SIL2级别,实时操作系统可以达到最高等级SIL3;广义上,关键性可以扩展至实时等级、功耗等级、信息安全等级等目标。
在这样的系统中,需要解决如下几个问题:
高效地混合部署问题:如何高效地实现多OS协同开发、集成构建、独立部署、独立升级
高效地通信与协作问题:系统的整体功能由各个域协同完成,因此如何高效地实现不同域之间高效、可扩展、实时、安全的通信
高效地隔离与保护问题:如何高效地实现多个域之间的强隔离与保护,使得出故障时彼此不互相影响,以及较小的可信基(Trust Compute Base)
高效地资源共享与调度问题:如何在满足不同目标约束下(实时、功能安全、性能、功耗),高效地管理调度资源,从而提升硬件资源利用率
对于上述问题,openEuler Embedded的当前思路是 混合关键性系统 = 部署 + 隔离 + 调度 ,即首先实现多OS的混合部署,再实现多OS之间的隔离与保护,最后通过混合关键性调度提升资源利用率, 具体可以映射到 混合部署框架 和 嵌入式虚拟化。混合部署框架解决 高效地混合部署问题 和 高效地通信与协作问题,嵌入式虚拟化解决 高效地隔离与保护问题 和 高效地资源共享与调度问题。
多OS混合部署框架¶
openEuler Embedded中多OS混合部署框架的架构图如下所示,引入了开源框架 OpenAMP 作为基础, 并结合自身需要 进一步创新。
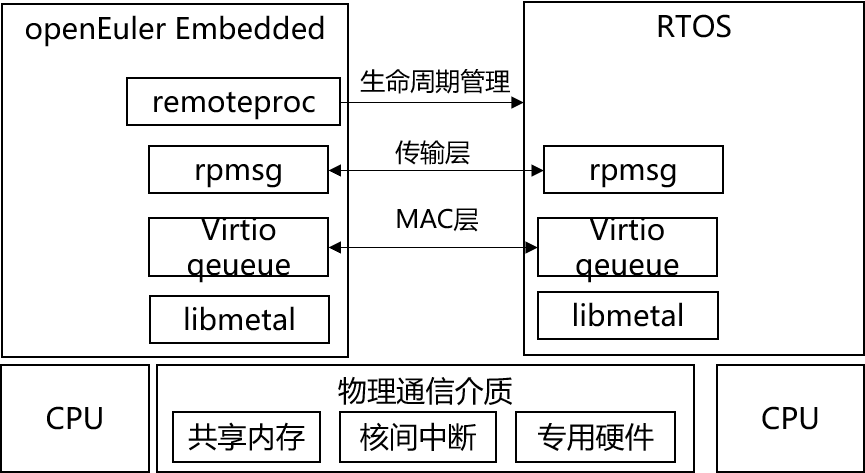
图 2 多OS混合部署框架的基础架构¶
在上述架构中,libmetal提供屏蔽了不同系统实现的细节提供了统一的抽象,virtio queue相当于网络协议中的MAC层提供高效的底层通信机制,rpmsg相当于网络协议中的传输层提供了基于端点(endpoint)与通道(channel)抽象的通信机制,remoteproc提供生命周期管理功能包括初始化、启动、暂停、结束等。
目前,混合部署框架不仅能在qemu上进行仿真验证,还支持在树莓派实际硬件上部署运行。未来,openEuler Embedded的混合部署框架还会继续演进,包括对接更多的实时操作系统,如国产开源实时操作系统 RT-Thread,实现如下图所示的多OS服务化部署并适时引入基于虚拟化技术的嵌入式弹性底座。
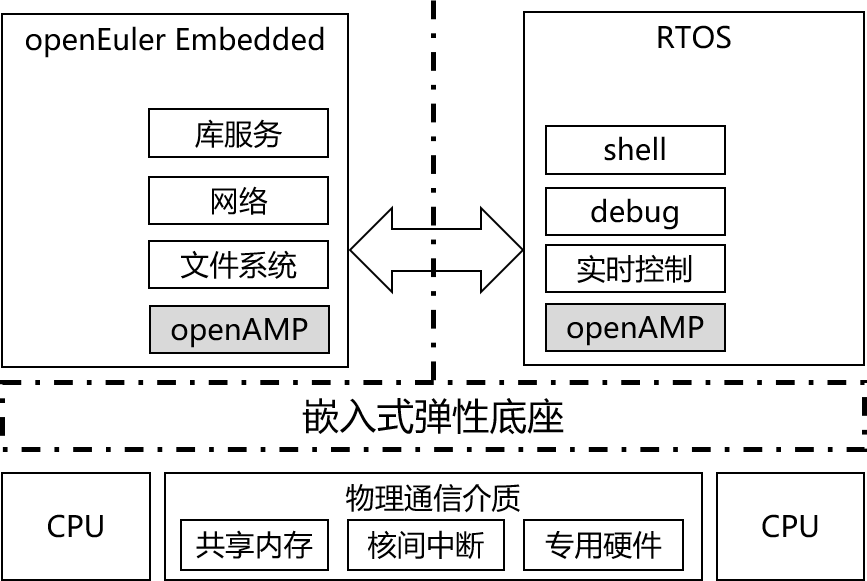
图 3 多OS服务化部署架构¶
在上述多OS服务化部署架构中,openEuler Embedded是中心,主要对其他OS提供管理、网络、文件系统等通用服务,其他OS可以专注于其所擅长的领域提供诸如实时控制、监控等服务,并通过shell、log和debug等通道与Linux丰富而强大维测体对接从而简化开发工作。
构建指南¶
openEuler Embedded 不仅支持混合关键性系统特性的单独构建,还实现了集成构建,能够使用同一套工具链一键式构建出包含linux, zephyr的部署镜像。
Note
单独构建混合关键系统特性的方法请参考 mcs 构建安装指导
集成构建指导
根据 oebuild快速构建 ,初始化oebuild工作目录;
oebuild init <directory> cd <directory> oebuild update下载依赖代码:
zephyr 的构建包含核心部分和外部 zephyr modules 部分,由于全部代码较大,需要从 src-openEuler/zephyr 中的百度网盘路径下载 zephyr_project_v3.2.0.tar.gz,并放在构建代码目录下的 zephyrproject 子目录中(对应oebuild工作目录的<workspace>/src/zephyrproject)
python3-pykwalify 在 openeuler 社区尚无相应的源码包,需要从上游下载 Download pykwalify-1.8.0.tar.gz ,并放在构建代码目录下的 python3-pykwalify 子目录中(对应oebuild工作目录的<workspace>/src/python3-pykwalify)
进入oebuild工作目录,创建对应的编译配置文件,mcs镜像需要添加
-f openeuler-mcs:# qemu-arm64 oebuild generate -p aarch64-std -f openeuler-mcs -d <build_arm64_mcs> # RPI4 oebuild generate -p raspberrypi4-64 -f openeuler-mcs -d <build_rpi_mcs> # ok3568 oebuild generate -p ok3568 -f openeuler-mcs -d <build_ok3568_mcs> # hi3093 oebuild generate -p hi3093 -f openeuler-mcs -d <build_hi3093_mcs>
进入
<build>目录,编译openeuler-image-mcs:oebuild bitbake openeuler-image-mcs
Note
注意:构建 openeuler-image-mcs 需要在 oebuild 初始化时添加 -f openeuler-mcs。
使用方法¶
目前混合关键性系统(mcs)支持在qemu-aarch64和树莓派上部署运行,部署mcs需要预留出必要的内存、CPU资源,并且还需要bios提供psci支持。
- 1.镜像启动
对于树莓派:
集成构建出来的 openeuler-image-mcs 已经通过 dt-overlay 等方式预留了相关资源,并且默认使用了支持psci的uefi引导固件。因此只需要根据 openeuler-image-uefi启动使用指导 进行镜像启动,再部署mcs即可。
对于qemu:
需要准备一份dtb文件,dtb文件的制作可参考 配置dts预留出mcs_mem ,并通过以下命令启动qemu:
$ qemu-system-aarch64 -M virt,gic-version=3 -m 1G -cpu cortex-a57 -nographic \ -append 'maxcpus=3' -smp 4 \ -kernel zImage \ -initrd *.rootfs.cpio.gz \ -dtb qemu_mcs.dtb
对于ok3568:
已经通过条件判断的形式把预留内存加入了设备树,构建出来即可使用。
对于hi3093:
hi3093需要在boot以后限制maxcpus=3预留出一个cpu跑uniproton
# 使用在ctrl+b进入uboot,并限制启动的cpu数量 setenv bootargs "${bootargs} maxcpus=3"
- 2.部署mcs
step1: 调整内核打印等级并插入内核模块
# 为了不影响shell的使用,先屏蔽内核打印: $ echo "1 4 1 7" > /proc/sys/kernel/printk # 插入内核模块 $ modprobe mcs_km.ko # 备注:ok3568与hi3093已经实现了开机自动加载内核模块,无需重复此步骤
插入内核模块后,可以通过 cat /proc/iomem 查看预留出来的 mcs_mem,如:
qemu-aarch64 ~ # cat /proc/iomem ... 70000000-7fffffff : reserved 70000000-7fffffff : mcs_mem ...
若mcs_km.ko插入失败,可以通过dmesg看到对应的失败日志,可能的原因有:1.使用的交叉工具链与内核版本不匹配;2.未预留内存资源;3.使用的bios不支持psci
step2: 运行rpmsg_main程序,启动client os
qemu-arm64 和 RPI4:
$ rpmsg_main -c [cpu_id] -t [target_binfile] -a [target_binaddress] eg: $ rpmsg_main -c 3 -t /firmware/zephyr-image.bin -a 0x7a000000
若rpmsg_main成功运行,会有如下打印:
# rpmsg_main -c 3 -t /firmware/zephyr-image.bin -a 0x7a000000 ... start client os ... pls open /dev/pts/1 to talk with client OS pty_thread for uart is runnning ...
此时, 按ctrl-c可以通知client os下线并退出rpmsg_main ,下线后支持重复拉起。 也可以根据打印提示(
pls open /dev/pts/1 to talk with client OS), 通过 /dev/pts/1 与 client os 进行 shell 交互,例如:# 新建一个terminal,登录到运行环境 $ ssh user@ip # 连接pts设备 $ screen /dev/pts/1 # 敲回车后,可以打开client os的shell,对client os下发命令,例如 uart:~$ help uart:~$ kernel version #在ok3568上拉起rt-thread $ rpmsg_main -c 3 -t /firmware/rtthread-ok3568.bin -a 0x7a000000 #在hi3093上拉起uniproton $ rpmsg_main -c 3 -t /firmware/Uniproton_hi3093.bin -a 0x93000000
ok3568 开发板:
ok3568支持通过mcs拉起 RT-Thread,步骤如下:
# 拉起RTT; ok3568 ~ # ./rpmsg_main -c 3 -t /firmware/rtthread-ok3568.bin -a 0x7a000000 ... start client os ...
ok3568支持通过输入功能编号进行交互、下线、重新拉起:
# 输入h查看用法 h please input number:<1-8> 1. test echo 2. send matrix 3. start pty 4. close pty 5. shutdown clientOS 6. start clientOS 7. test ping 8. test flood-ping 9. exit
hi3093 开发板:
hi3093目前支持 uniproton 的拉起,查看串口输出。
# 拉起 uniproton $ ./rpmsg_main -c 3 -t /firmware/hi3093_ut.bin -a 0x93000000 & ... start client os ... pls open /dev/pts/1 to talk with client OS pty_thread for console is runnning ...
此时, 根据打印提示(
pls open /dev/pts/1 to talk with client OS), 通过 /dev/pts/1 可以与 uniproton 进行交互,例如:# 连接pts设备 $ screen /dev/pts/1 # 敲回车后,可以查看uniproton输出信息